Inicia sesión
Crear actividad
Tipos de actividades
Centro de ayuda
Introduce tu Game Pin
Blog
Premium
English
Español
Français
Crear actividad
Inicia sesión
Todas las actividades
Jugar Test
Imprimir Test
Robótica Lego
Autor :
José Antonio Sanz Montero
1.
¿A qué puertos se han conectado los motores grandes del bloque EV3?
A.
A los puertos 1 y 2
B.
A los puertos B y C
C.
A los puertos C y D
D.
A los puertos 3 y 4
2.
¿A qué puerto se ha conectado el sensor de ultrasonidos?
A.
Al puerto 1
B.
Al puerto 2
C.
Al puerto 3
D.
Al puerto 4
3.
¿A qué puerto se ha conectado el sensor de color?
A.
Al puerto 1
B.
Al puerto 2
C.
Al puerto 3
D.
Al puerto 4
4.
¿Cómo se ejecuta un programa, una vez seleccionado en la interfaz del bloque de EV3?
A.
Pulsando en el botón Centro
B.
Pulsando en el bloque Inicio
C.
Pulsando en el bloque Bucle Final
D.
Pulsando en el bloque Acción
5.
¿A qué generación de robots Lego pertenece el EV3?
A.
Segunda generación
B.
Cuarta generación
C.
Segunda generación
D.
Tercera generación
6.
En la organización de archivos de EV3 cada programa se almacena en:
A.
Un archivo .NXT
B.
Un archivo .ZIP
C.
Un archivo .EV3
D.
Una carpeta
7.
¿En qué carpeta de archivos se almacenan los programas creados en la interfaz del bloque?
A.
BrikProg_SAVE
B.
BrkDL_SAVE
C.
ROOT_Prog
D.
Documents
8.
¿Qué tipo de motores tiene el robot Lego EV3?
A.
Motor pesado y ligero
B.
Motores grandes y mediano
C.
Motores continuo y discontinuo
D.
Motores de 2 y 4 tiempos
9.
¿Cuántos colores reconoce el sensor de color de Lego EV3?
A.
256 colores
B.
7 colores
C.
16 colores
D.
2 colores
10.
¿Qué dispositivos se conectan a los puertos de entrada numerados del 1 al 4 en el brick del EV3?
A.
Baterías
B.
Conectores
C.
Sensores
D.
Motores
11.
¿Qué instalación preinstalada se utilizaría para consultar los valores que devuelven los sensores o motores conectados al bloque EV3?
A.
Brick Program
B.
Port View
C.
IR Control
D.
Motor Control
12.
¿Qué componente del robot EV3 realiza la función de unidad de control y central eléctrica?
A.
Girosensor
B.
Servomotor
C.
Sensor de color
D.
Brick o bloque
13.
¿Para qué se puede utilizar el girosensor?
A.
Programar giros de las ruedas
B.
Programar giros en 3D
C.
Programar giros del motor
D.
Programar giros con exactitud del robot
14.
¿En qué modo se aconseja utilizar el sensor de color para programar un robot que detecte una línea negra sobre una superficie blanca?
A.
Intensidad de sombra
B.
Color
C.
Intensidad de luz reflejada
D.
Intensidad de luz ambiental
15.
¿Qué tipo de motor es más rápido en el Lego EV3?
A.
Los dos tipos de motor
B.
Motor grande
C.
Motor mediano
D.
Depende de la configuración
16.
¿Qué tipo de sensor utiliza las ondas de sonido reflejadas para medir la distancia y la presencia de obstáculos?
A.
Táctil
B.
Ultrasonidos
C.
Girosensor
D.
De color
17.
El antecesor del robot Lego EV3, es el:
A.
WeDo
B.
NXT 2.0
C.
EV2
D.
EV1
18.
Para que un programa se ejecute en el bloque EV3 es necesario:
A.
Que esté escrito en lenguaje NXT
B.
Que esté almacenado en la memoria USB
C.
Que esté cargado en el ordenador
D.
Que esté cargado en el bloque
19.
¿Qué modo del sensor ultrasónico se utiliza para captar la existencia de otro sensor ultrasónico?
A.
Modo proximidad
B.
Modo escáner
C.
Modo medida
D.
Modo presencia
20.
¿Qué sistema de un robot constituye el brick inteligente de un EV3?
A.
Esqueleto
B.
Unidad de control
C.
Conector
D.
Motor
21.
¿Qué sensor no se proporciona en el set básico de Lego EV3 Educación?.
A.
Sensor de color
B.
Sensor de ultrasonidos
C.
Sensor de infrarrojos
D.
Sensor táctil
22.
¿Qué modelo de robot se recomienda para la iniciación a la programación en el Lego EV3?
A.
GyroBoy
B.
Vehículo Educator
C.
Perro Puppy
D.
RobotXTer
23.
¿Qué sistema de un robot realiza la función de percepción?
A.
Sensores
B.
Conectores
C.
Motores
D.
Esqueleto
24.
Para programar un robot que se detenga a una distancia determinada de una pared, necesitamos utilizar el sensor:
A.
Color
B.
Girosensor
C.
Táctil
D.
Ultrasonidos
25.
¿De qué maneras se puede programar el robot?
A.
Desde el ordenador y desde el bloque EV3
B.
Desde el ordenador únicamente
C.
Desde el bloque EV3 únicamente
D.
Desde cualquier aparato electrónico
26.
¿Qué parámetro se puede configurar en el bloque Esperar Tiempo?
A.
Tiempo en milésimas de segundos
B.
Tiempo en minutos
C.
Tiempo en segundos
D.
Tiempo en horas
27.
¿Qué aplicación preinstalada en el bloque EV3 permite comprobar si los motores funcionan correctamente?
A.
Port View
B.
Brick Datalog
C.
Motor Control
D.
IR control
28.
¿A qué puerto se ha conectado el táctil?
A.
Al puerto 1
B.
Al puerto 2
C.
Al puerto 3
D.
Al puerto 4
29.
¿A qué puerto se ha conectado el girosensor?
A.
Al puerto 1
B.
Al puerto 2
C.
Al puerto 3
D.
Al puerto 4
30.
¿A qué puerto se ha conectado el motor mediano?
A.
Al puerto A
B.
Al puerto B
C.
Al puerto C
D.
Al puerto D
31.
El sensor de la imagen, es:
A.
Ultrasonidos
B.
Color
C.
Girosensor
D.
Táctil
32.
El sensor de la imagen, es:
A.
Ultrasonidos
B.
Color
C.
Girosensor
D.
Táctil
33.
El sensor de la imagen, es:
A.
Ultrasonidos
B.
Color
C.
Girosensor
D.
Táctil
34.
El sensor de la imagen, es:
A.
Ultrasonidos
B.
Color
C.
Girosensor
D.
Táctil
35.
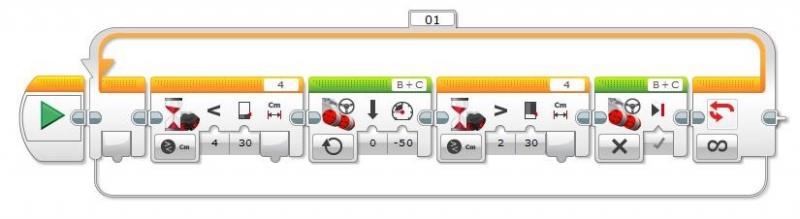
Con el siguiente programa, el robot:
A.
Se para si hay un objeto a más de 4 cm
B.
Va hacia atrás si hay un objeto a menos de 30 cm y se para si la distancia es mayor a 30 cm
C.
Detecta un objeto de color rojo y va hacia atrás
D.
Si choca con un objeto va hacia se para
36.
Con el siguiente programa, el robot:
A.
Al pulsar el sensor táctil el robot va hacia delante y al volver a pulsarlo se para
B.
Al pulsar el sensor de color el robot sube y baja el brazo
C.
Al pulsar el sensor táctil el robot va hacia detrás y espera hasta que se pulsa de nuevo
D.
Detecta un objeto a menos de 1 cm de distancia
37.
Con el siguiente programa, el robot:
A.
Va hacia delante hasta que detecta un sonido
B.
Va hacia delante 3 rotaciones, espera 2 segundos, dice Goodbyte, gira 180º y vuelve al punto de inicio
C.
Va hacia delante hasta que choca con la pared y regresa al punto de inicio
D.
Va hacia delante y cuando la distancia es menor de 2 cm, dice GoodBye y gira
38.
Con el siguiente programa, el robot:
A.
Va hacia delante y si hay un objeto a menos de 10 cm realiza un giro
B.
Va hacia delante y al chocar contra la pared realiza un giro
C.
Es capaz de seguir una línea negra
D.
Va hacia delante y si detecta oscuridad se para
39.
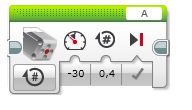
. Con el siguiente bloque, el robot:
A.
Detecta el choque contra una pared
B.
Sube el brazo
C.
Baja el brazo
D.
Detecta un objeto a menos de 30 cm
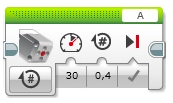
40.
Con el siguiente bloque, el robot:
A.
Detecta el choque contra una pared
B.
Sube el brazo
C.
Baja el brazo
D.
Detecta un objeto a menos de 30 cm