Inicia sesión
Crear actividad
Tipos de actividades
Centro de ayuda
Introduce tu Game Pin
Blog
Premium
English
Español
Français
Crear actividad
Inicia sesión
Todas las actividades
Jugar Test
Imprimir Test
Robótica mBot (D)
Autor :
Eduardo Millán
1.
Los elementos claves de un robot son:
A.
Ruedas, tornillos y motores
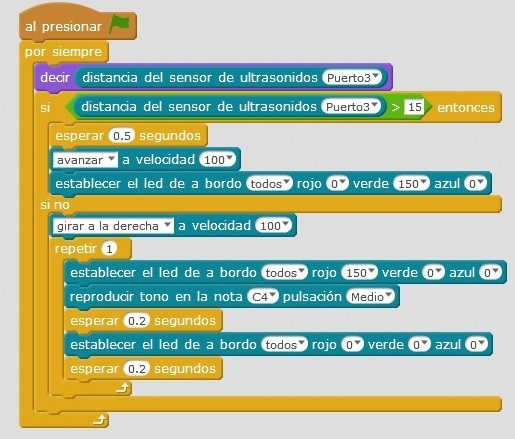
B.
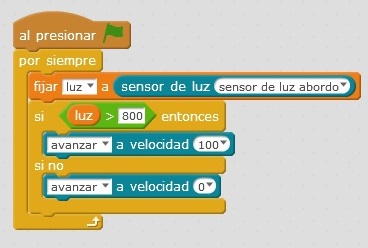
Sensores, actuadores y programación
C.
Unidades, ruedas y motores
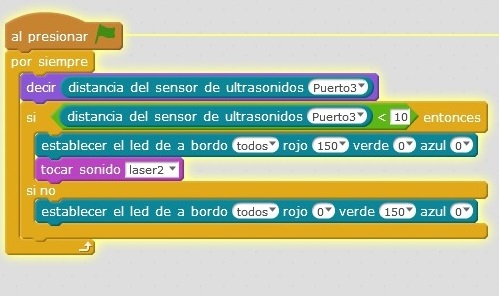
D.
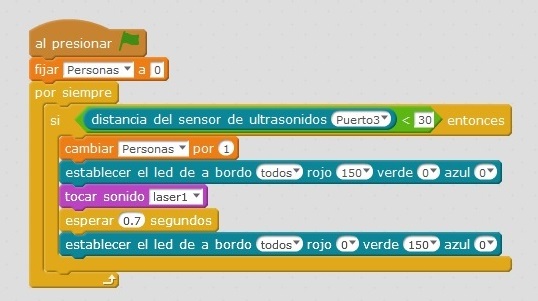
Pilas y baterías
2.
El modelo de robot que estamos usando es el:
A.
Ranger Bot
B.
Ultimate robot
C.
mBot
D.
Lego
3.
La placa base de nuestro robot es la:
A.
Auriga
B.
Orion
C.
Arduino
D.
mCore
4.
Uno de los sensores incluidos en la placa es el de:
A.
Sensibilidad
B.
Sonido
C.
Luminosidad
D.
Ultrasonidos
5.
Un actuador incluido en la placa es:
A.
Zumbador
B.
Motor
C.
Pinza
D.
Ventilador
6.
El sensor Sensor de proximidad: Me Ultrasonic Sensor, está conectado al puerto:
A.
1
B.
2
C.
3
D.
4
7.
El sensor Sensor sigue-líneas: Me Line-folower Sensor, está conectado al puerto:
A.
1
B.
2
C.
3
D.
4
8.
El motor M1:
A.
Es el motor de la derecha
B.
Es el motor del centro
C.
Es el motor de la izquierda
D.
Es el motor trasero
9.
El motor M2:
A.
Es el motor trasero
B.
Es el motor delantero
C.
Es el motor de la izquierda
D.
Es el motor de la derecha
10.
Los elementos que captan información del entorno y la envían a la placa base, son:
A.
Sensores
B.
Motores
C.
Actuadores
D.
Programas
11.
El sensor de la imagen es:
A.
De ultrasonidos o proximidad
B.
De luminosidad
C.
De visión
D.
De movimiento
12.
El sensor de la imagen es:
A.
Luminosidad
B.
Sonido
C.
Velocidad
D.
Sensor sigue-líneas: Me Line-folower Sensor
13.
El sensor es capaz de medir la distancia, es el:
A.
Sensor de velocidad
B.
Sensor de proximidad: Me Ultrasonic Sensor
C.
.Sensor sigue-líneas: Me Line-folower Sensor
D.
Sensor de color
14.
El sensor sigue-líneas: Me Line-folower Sensor:
A.
Es capaz de detectar el color negro debajo de sus sensores
B.
Es capaz de detectar distintos colores
C.
Es capaz de detectar el sonido
D.
Es capaz de detectar la velocidad
15.
Los actuadores:
A.
Reciben información de la placa base y realizan alguna acción
B.
Captan información del entorno
C.
Son un conjunto de instrucciones
D.
Pertenecen al bloque de entrada
16.
Las dos luces Led RGB, son:
A.
Sensores
B.
Placas bases
C.
Motores
D.
Actuadores
17.
La conexión inalámbrica que usamos con nuestro robot, es:
A.
Bluetooth
B.
2.4G
C.
Multitexto
D.
USC
18.
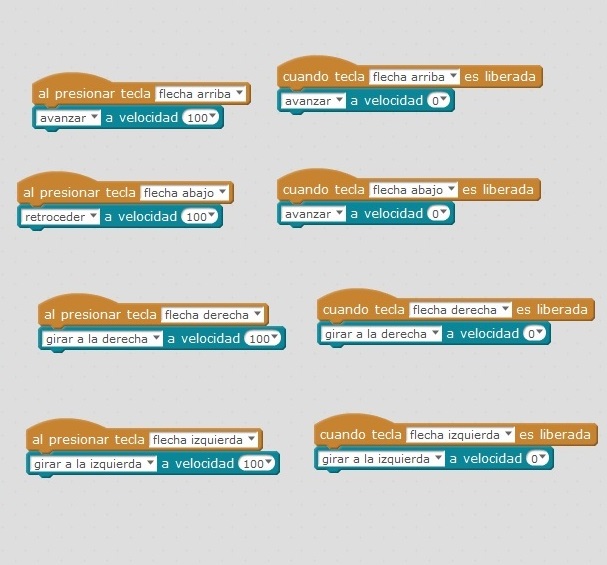
¿Para qué se puede usar este programa?
A.
Para controlar la luz ambiental
B.
Para hacer un semáforo acústico
C.
Para controlar el movimiento del robot
D.
Para que siga él solo la línea negra
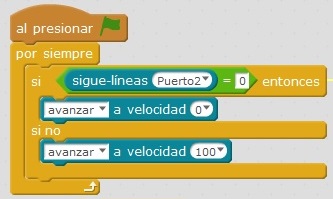
19.
Con el siguiente programa, el robot:
A.
Realiza una maniobra de evasión al encontrarse un obstáculo
B.
Realiza el encendido y apagado de los Leds RGB, imitando una intermitencia
C.
Es capaz de seguir una línea negra
D.
Irá hacia delante y luego hacia la derecha
20.
Si el sensor sigue-líneas, tiene un valor = 0, significa que:
A.
El sensor está totalmente encima de la línea negra
B.
El sensor está totalmente encima de la línea blanca
C.
El lado derecho está en la línea blanca y el izquierdo en la línea negra
D.
El lado derecho está en la linea negra y el izquierdo en la línea blanca
21.
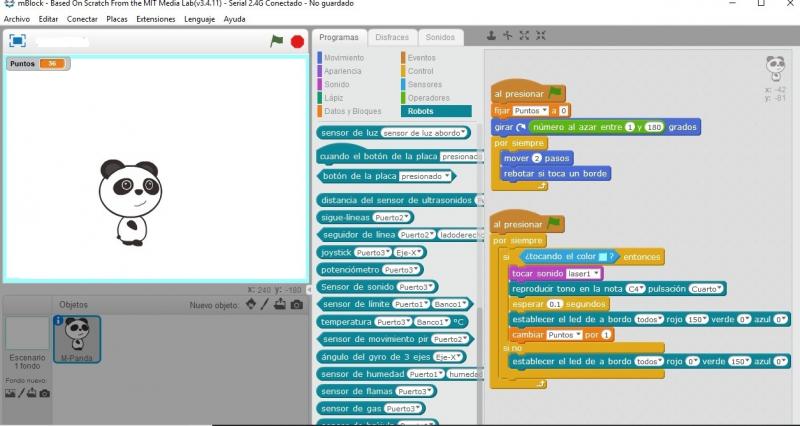
Con el siguiente programa, el robot:
A.
Sería capaz de seguir una línea negra
B.
Cada vez que el panda toque en el borde, se suma un punto , suena el láser y se enciende el led rojo
C.
Se para y gira al encontrar un obstáculo a menos de 10 cm
D.
Se para al llegar a una línea negra
22.
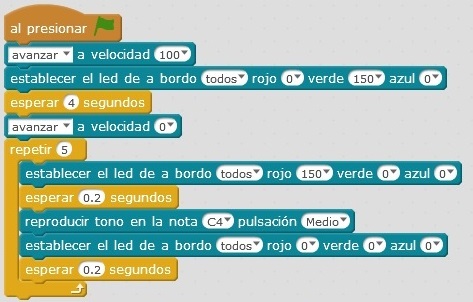
Con el siguiente programa, el robot:
A.
Avanza durante cuatro segundos con los leds en verde y al parar se encienden y apagan en rojo, y suena el zumbador
B.
Es capaz de detectar un obstáculo a 100 cm
C.
Al llegar a una línea negra se para
D.
Se pone en funcionamiento al recibir un haz de luz
23.
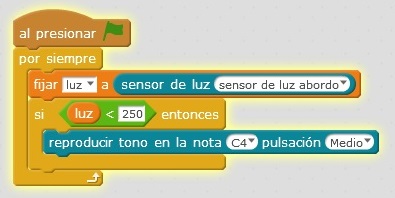
Con el siguiente programa, el robot:
A.
Se parará al recibir demasiada luz
B.
Empezará a avanzar al recibir demasiada luz
C.
Si el nivel de luz detectado, es menor a 250, sonará el zumbador
D.
Si el nivel de luz detectado, es mayor a 250, se parará
24.
Con el siguiente programa, el robot:
A.
Sería capaz de seguir una línea negra
B.
Avanza hacia la luz
C.
Sería capaz de evitar un obstáculo
D.
Sería capaz de retroceder cuando hay luz
25.
Con el siguiente programa, el robot:
A.
Es capaz de avanzar hacia la luz
B.
Es capaz de seguir una línea negra
C.
Cuando llega a una línea negra, se para
D.
Retrocede cuando el ruido es elevado
26.
Con el siguiente programa, el robot:
A.
Mide la luz que hay en el ambiente
B.
Avanza al detectar una línea negra
C.
Avanza al aumentar el nivel de luz por encima de 15
D.
Mide la distancia, y si es menor de 10 cm, entonces suena el láser y se encienden los leds en rojo
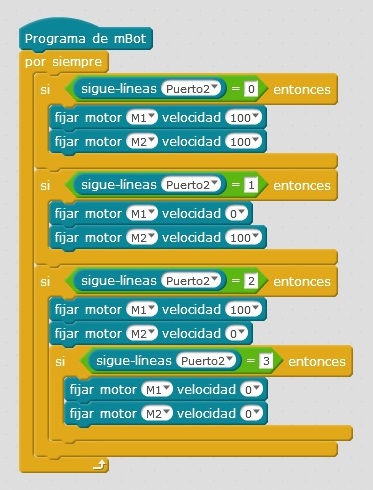
27.
Con el siguiente programa, el robot:
A.
Sería capaz de seguir una línea negra
B.
Sería capaz de pararse al llegar a una línea negra
C.
Sería capaz de contar las personas que pasaran por un pasillo, a menos de 30 cm
D.
Sería capaz de avanzar hacia la luz
28.
Con el siguiente programa, el robot:
A.
Es capaz de avanzar hacia la luz
B.
Es capaz de pararse al llegar a una línea negra
C.
Es capaz de contar las personas que pasan por un pasillo
D.
Es capaz de retroceder al aumentar la luz
29.
Con el siguiente programa, el robot:
A.
Es capaz de avanzar hacia la luz
B.
Es capaz de evitar un obstáculo a menos de 1 cm
C.
Es capaz de retroceder cuando aumenta la luz
D.
Es capaz de seguir una línea negra